
Scoprite come la nostra Passione crea le nostre Tecnologie, dal sistema HPS (High Precision Speed) sino all’ultimo nato DDS (Direct Drive System), dalla nostra esclusiva meccanica di precisione ai nostri speciali sistemi elettronici e software di controllo…. tutto MADE IN ITALY
Uno dei nostri ultimi progetti è una nuova generazione di montature robotiche professionali, in configurazione altazimutale a forcella, con derotatore/fuocheggiatore a controllo integrato, in cui abbiamo applicato il nostro sistema Direct Drive System
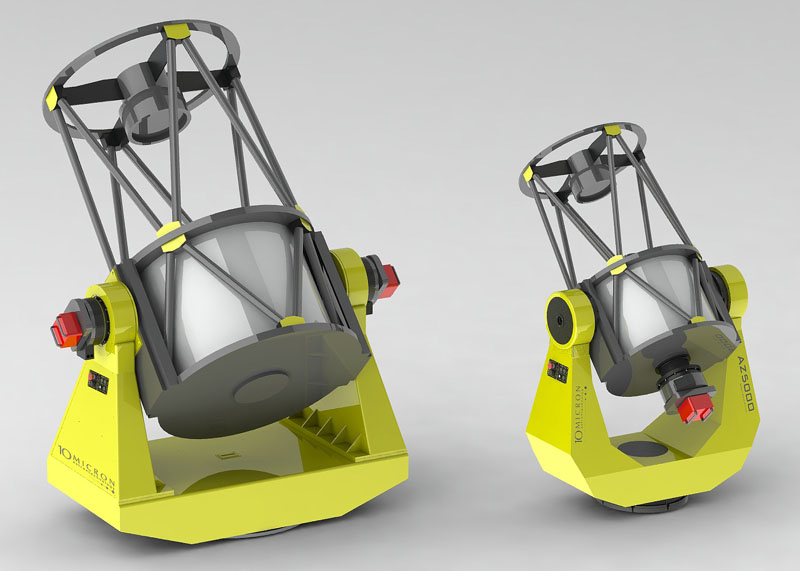
Montature 10 Micron AZ ROBOTIC MOUNTS, AZ8000 e AZ5000, con tecnologia DDS
Grazie alla nostra lunga esperienza nel settore delle montature astronomiche di alto livello, siamo lieti di offrire questa soluzione specialmente sviluppata per applicazioni professionali in campo astronomico e satellitare, per i quali sono richiesti requisiti molto impegnativi in termini di qualità, prestazioni ed affidabilità. Le nostre montature AZ DDS integrano le più recenti tecnologie meccaniche, elettriche, elettroniche, informatiche e di design; ogni singola specifica e componente sono stati accuratemente studiati per poter raggiungere il più alto livello di efficienza che da sempre caratterizza i prodotti 10Micron. Sono state inoltre implementate speciali funzioni di sicurezza sia per l’operatre che per la strumentazione

AZ5000 DDS-N con ottica dedicata da 24″ con fuoco Nasmyth
Spesso accade che un potenziale cliente ci domandi: Perché dovrei comprare una montatura 10Micron HPS?
La risposta breve è: perché funziona meglio, integra tutta una serie di caratteristiche che altre montature non possiedono ora e non avranno in un futuro prevedibile, possiede uno speciale sistema di encoder assoluti su entrambi gli assi per la massima precisione di funzionamento; queste caratteristiche sono talmente importanti a prescindere da quanto altri possano dire, che possono cambiare per sempre il vostro modo di pensare le osservazioni astronomiche.
Se non siete soddisfatti della risposta breve, continuate a leggere.
![]()
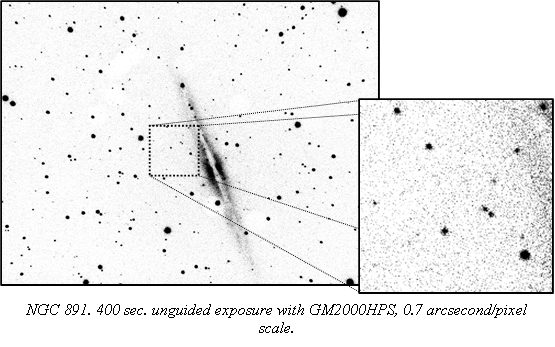
HPS significa “alta precisione e velocità” ed è il nome per questa serie di montature astronomiche 10Micron. Le montature HPS infatti dispongono di due encoder assoluti ad alta precisione montati direttamente su ogni asse per garantire precisione senza precedenti non solo nel puntamento ma soprattutto nell’inseguimento, e di motori per puntamento ad alta velocità. Questo imponente miglioramento delle prestazioni rispetto alla tecnologia precedente permette un cambiamento radicale nel flusso di lavoro di osservatori e astroimagers. Nella maggior parte delle applicazioni, inclusa la fotografia a lunga esposizione del profondo cielo, la necessità di un’autoguida viene eliminata. La precisione di puntamento permette di essere sicuri che, una volta inizializzata correttamente la montatura, gli oggetti saranno centrati anche in campo di vista piccolissimi ed anche con una configurazione mobile su un prato di montagna. Inoltre, l’elettronica interna consente di effettuare quasi tutte le operazioni senza la necessità di un PC esterno.
Gli encoder assoluti integrati negli assi forniscono alta precisione con una retroazione al di sotto del secondo d’arco per ogni movimento della montatura. Gli encoder assoluti rendono gli assi “vivi” e capaci di reagire anche ad eventuali forze esterne come il vento e le vibrazioni o contatti accidentali. Inoltre, questo feedback viene fornito a prescindere da qualsiasi procedura di azzeramento o di homing. Ciò significa che l’elettronica conosce sempre la posizione degli assi della montatura. E’ possibile muovere gli assi con le frizioni sbloccate e l’elettronica spenta, bloccare le frizioni in qualsiasi posizione e riaccendere: l’elettronica saprà sempre dove il telescopio sta puntando. È possibile addirittura utilizzare la montatura come un telescopio Dobson con puntamento manuale, mantenendo completamente la precisione “sotto il secondo d’arco” degli encoder. Questo significa avere maggior facilità d’uso quando si opera sul campo, in quanto la procedura di setup è molto più rapida.
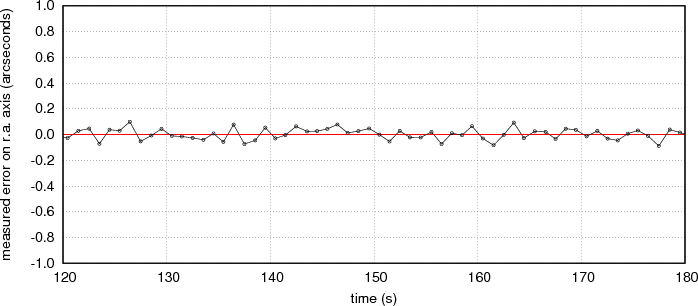
Con riferimento all’asse di ascensione retta, praticamente tutti gli errori “classici” causati dalle trasmissioni meccaniche vengono eliminati: non solo il cosiddetto “Errore Periodico”, che comprende le irregolarità periodiche dovute all’imperfezione nella produzione e montaggio della vite senza fine, ma anche gli errori non periodici causati da imperfezioni di corona, cuscinetti, cinghie ecc.
Per quanto riguarda l’asse di declinazione, potrebbe sembrare che il sistema di encoder sia meno importante, poiché teoricamente non vi è alcun movimento siderale. La realtà invece è che l’asse di declinazione è fondamentale per l’inseguimento siderale. Se si vuole compensare la rifrazione, le flessioni causate dall’insieme telescopio-montatura e così via, si dovrà spostare l’asse di declinazione a bassissima velocità. Inoltre, mentre l’asse di ascensione retta lavora sempre alla stessa velocità (con solo alcune piccole correzioni in più o in meno), l’asse di declinazione lavora sempre vicino alla velocità zero, con occasionali inversioni della direzione di movimento. Ciò significa che giochi meccanici, flessioni delle cinghie e delle frizioni saranno sempre presenti e non si può contare su alcun sistema di correzione dell’errore periodico (PEC) per compensarli.
Trucchi per minimizzare l’effetto di tali forze in montature tradizionali richiedono un precarico molto leggero sulla vite senza fine, con il rischio di movimenti incontrollati quando il telescopio è  sottoposto a piccole forze esterne, a causa del disimpegno della vite stessa dalla corona; oppure infruttuose procedure di calibrazione nel software per compensare il backlash; ancora, regolare manualmente le trasmissioni. Oppure, introdurre addirittura errori di allineamento per forzare le correzioni dell’AutoGuida sempre nella stessa direzione. Quindi, avere un encoder montato direttamente sull’asse in grado di compensare tutti gli errori meccanici è altrettanto importante in declinazione quanto in ascensione retta.
sottoposto a piccole forze esterne, a causa del disimpegno della vite stessa dalla corona; oppure infruttuose procedure di calibrazione nel software per compensare il backlash; ancora, regolare manualmente le trasmissioni. Oppure, introdurre addirittura errori di allineamento per forzare le correzioni dell’AutoGuida sempre nella stessa direzione. Quindi, avere un encoder montato direttamente sull’asse in grado di compensare tutti gli errori meccanici è altrettanto importante in declinazione quanto in ascensione retta.
La funzione di inseguimento degli oggetti astronomici può essere scomposta in diverse sotto-funzioni di cui parleremo nei prossimi paragrafi.
1. Modellazione dell’orientamento della montatura rispetto alla Terra.
2. Modellazione dell’orientamento del telescopio rispetto alla montatura.
3. Modellazione degli gli errori del sistema meccanico rispetto ad un sistema “ideale”.
4. Modellazione dell’influenza dell’atmosfera sul percorso dei raggi luminosi.
5. Modellazione dell’orientamento della Terra.
6. Modellazione del moto di oggetti astronomici stessi.
Al fine di ottenere la precisione sotto il secondo d’arco tipica delle montature HPS, tutti questi parametri devono essere presi in considerazione. Inoltre, molti effetti più “sottili” cominciano ad essere evidenti, e hanno bisogno di una particolare attenzione.
1- Modellazione dell’orientamento della montatura rispetto alla Terra
Una montatura equatoriale ideale ha il suo asse di ascensione retta allineato esattamente al polo celeste. Se vi sono errori di allineamento, la montatura mostrerà vari errori di puntamento e inseguimento, in entrambi gli assi, variabili a secondo del punto di cielo puntato. Pertanto, con una tipica montatura che insegue gli astri ad una velocità costante sul suo asse di ascensione retta, l’allineamento fisico al polo assume la massima importanza. Ci sono molti metodi per raggiungere tale obiettivo, dal metodo” Bigourdan” ormai universale e affidabile, ma molto lungo e laborioso, a metodi iterativi che sfruttano le capacità delle montature computerizzate, al tradizionale cannocchiale polare (che è, in ogni caso, più difficile da calibrare , allineare e utilizzare correttamente di quanto si possa pensare ). Molte montature computerizzate consentono di puntare una, due o tre stelle, e calcolare il disallineamento dall’asse polare. Queste informazioni vengono poi utilizzate per il puntamento degli oggetti.
Le montature HPS possono fare lo stesso, con l’uso aggiuntivo di questa parte di informazioni per correggere l’inseguimento degli oggetti. Ciò significa che l’inseguimento sarà sempre corretto, anche se lo strumento non è allineato al polo celeste. Naturalmente, è necessario un allineamento ragionevole per evitare la rotazione campo su lunghe sequenze di imaging. Il firmware 10Micron offre diverse funzioni importanti; ad esempio, per lo stazionamento polare, il software dirà di quanti giri o frazioni di giro si dovranno ruotare le manopole di regolazione dell’azimuth e dell’altezza per llinearsi al polo! In questo modo abbiamo eliminato il cannocchiale polare, a tutto vantaggio della rigidità meccanica degli assi e della facilità operativa ; infatti l’allineamento iniziale può essere eseguito con montatura disallineata di molti gradi dal polo celeste, centrando approssimativamente due stelle luminose nell’oculare (con movimenti anche manuali degli assi, come in un Dobson), per poi centrare una terza stella mediante con le manopole altazimutali con indicazioni esatte su quanto ruotarle; questo è certamente molto più pratico e veloce rispetto all’allineamento con il tipico cannocchiale polare che necessita di regolazioni di data e ora, di compensazione della longitudine, magari restando inginocchiati per centrare il pattern stellare corretto per il vostro emisfero in un piccolo campo di vista.
Per usare il sistema 10Micron occorre tuttavia una conoscenza accurata dell’ora della posizione sulla Terra. Se si prevede di riutilizzare l’allineamento in seguito (per esempio, se ci si trova in un osservatorio), si dovrà mantenere l’orologio interno della montatura sincronizzato con precisione e utilizzare precise coordinate per il sito. Per questo motivo, oltre ai consueti dati di inizializzazione da pulsantiera o da PC esterno, le montature 10Micron prevedono anche un modulo GPS dedicato per l’acquisizione accurata ed immediata di queste informazioni
2 – Modellazione dell’orientamento del telescopio rispetto alla montatura
Naturalmente, l’asse ottico del telescopio non sarà perfettamente perpendicolare all’asse di declinazione, e non sarà perfettamente allineato con l’angolo zero dell’encoder assoluto. Quando si aggiunge la terza stella per la procedura di allineamento, questi errori vengono calcolati istantaneamente e corretti d’ora in poi automaticamente.
3 – Modellazione degli gli errori del sistema meccanico rispetto ad un sistema “ideale”.
Tutti sappiamo che nessun sistema meccanico può considerarsi “ideale”. Anche con encoder ad alta precisione montati direttamente sugli assi, vi è ad esempio ancora il problema delle flessioni meccaniche. Nella grande maggioranza delle montature in commercio, gli errori meccanici non vengono presi in considerazione dal software di controllo. Naturalmente, questi errori possono essere minimizzati (ma mai eliminati) attraverso un’attenta progettazione e poi in fase di produzione ma, per esempio, se consideriamo un errore di un secondo d’arco durante l’esposizione di un’immagine, un semplice calcolo mostra che questo errore può essere introdotto da una deformazione di una gamba del treppiede di soli 5 millesimi di millimetro! Una deformazione come questa può essere facilmente causata semplicemente muovendo gli assi di un telescopio il cui baricentro non sia perfettamente equilibrato. Quindi, l’idea migliore che si può attuare è realizzare un modello virtuale che rappresenti le flessioni meccaniche di montatura e telescopio. Dovremo puntare varie posizioni nel cielo, ed il sistema 10Micron confronterà la posizione con la lettura effettiva dell’encoder (vale a dire, l’angolo assoluto impostato sugli assi della montatura). Con un numero sufficiente di punti, la flessione può essere modellata abbastanza bene da permettere un puntamento ad alta precisione. Per quanto ne sappiamo, nessuna montatura astronomica attualmente sul mercato integra questa funzione senza l’uso di un computer esterno. Con le montature 10Micron, la procedura è estremamente semplice in quanto basta aggiungere stelle a quelle già utilizzate per l’allineamento iniziale. Naturalmente, questo può essere automatizzato in modo molto efficiente utilizzando programmi esterni che puntano un insieme predefinito di posizioni nel cielo, quindi riprendendo delle immagini e misurando le coordinate esatte in un processo chiamato “plate solving” e fornendo nuovamente le coordinate alla montatura. È possibile utilizzare fino a 100 stelle / punti di allineamento per questo scopo, e la procedura può avvenire in tempi sorprendentemente brevi, grazie all’elevata velocità di puntamento delle montature 10Micron. Naturalmente, tutto questo funziona se gli errori meccanici sono ripetibili. Ciò significa che, mentre la flessione meccanica può essere di solito modellata con eccellente precisione, questo non vale per i giochi meccanici o backlash. Tuttavia nelle montature 10Micron gli encoder assoluti sugli assi eliminano totalmente il problema del backlash, durante il processo di modellazione o mentre si punta o insegue un oggetto; all’utente rimane solo il compito di eliminare problemi quali mirror flop, giochi meccanici su fuocheggiatori o portaoculari ecc.
4 – Modellazione dell’influenza dell’atmosfera sul percorso dei fasci luminosi.
L’atmosfera terrestre devia i fasci di luce provenienti dagli oggetti astronomici a seconda della densità dell’aria. Questo fenomeno è chiamato “rifrazione atmosferica”. Con alcune montature tradizionali, spesso si consiglia di puntare l’asse di ascensione retta al polo celeste rifratto, e impostare una velocità di inseguimento speciale (la cosiddetta velocità “king”), che compensa grossolanamente la differenza di velocità apparente dovuta alla rifrazione (solo in ascensione retta). Le montature 10Micron possiedono un sistema ben più efficace, e consentono di impostare i valori di pressione atmosferica e temperatura dell’aria in modo da ottenere una correzione molto precisa della rifrazione; tali valori possono essere modificati durante laa sessione di osservazione, per correggere continuamente il puntamento e l’inseguimento in base alle eventuali variazioni atmosferiche. Questo può essere fatto manualmente dalla pulsantiera o da un PC esterno.
5 – Modellazione dell’orientamento della Terra.
Come tutti sanno, la Terra ruota rispetto agli oggetti astronomici ed il suo movimento principale è la rotazione diurna. Una cosiddetta montatura equatoriale provvede a compensare la rotazione diurna terrestre con un movimento a velocità costante attorno all’asse di ascensione retta. Questa velocità di solito è data da un orologio di quarzo, e quindi dovrebbe essere ragionevolmente precisa. Quello che molti non sanno è che i tipici oscillatori al quarzo utilizzati in elettronica (e anche nel vostro PC) non sono corretti per la temperatura. Inoltre, essi non sono estremamente precisi comunque. Ad una temperatura di -5 ° C (23 ° F), che non è rara per una sessione osservativa invernale, un quarzo tipico può avere un errore di decine di parti per milione (ppm). Errori di 20 o 30 ppm sono comunemente osservati, e possono causare errori di ascensione retta accumulando circa 2,5 secondi al giorno, il che significa più di un secondo d’arco all’ora. La perdita di precisione di puntamento in una notte d’inverno di 12 ore sarebbe di circa 20 secondi d’arco, e molto di più se la montatura viene spenta e ri-accesa alcuni giorni dopo. Questo problema può essere corretto mantenendo la montatura sempre sincronizzata con una sorgente esterna, come un normale PC con l’orologio sincronizzato con il time server NIST, o con il modulo GPS opzionale di cui abbiamo già parlato. Attualmente , tutti i nostri sistemi dispongono di un orologio con batteria di backup con compensazione della temperatura, in grado di segnare il tempo con una precisione di 3,5 ppm da -40 ° C a + 40 ° C (-40 ° F a + 104 ° F). Un movimento molto più lento, ma comunque di fondamentale importanza, è la precessione degli equinozi. Se non si modella la precessione, si è costretti ad utilizzare le coordinate standard (per esempio durante l’allineamento). Qualcuno potrebbe pensare che se si effettua un allineamento con le coordinate J2000, allora si dovrebbe essere in grado di puntare oggetti precisamente, usando le stesse coordinate J2000: niente potrebbe essere più lontano dalla realtà! La precessione cambia la direzione dell’asse di rotazione della Terra, cioè il polo celeste, quindi questo significa che l’allineamento funzionerebbe … per alcuni minuti, dopodiché la precisione di puntamento sarebbe pessima. Alcuni sistemi non tengono conto della precessione nei loro database, al contrario delle montature 10Micron!. Per impostazione predefinita, le montature 10Micron lavorano in JNOW durante la comunicazione con l’esterno, ad esempio le coordinate che si leggono e si impostano nella tastiera sono riferite all’equinozio vero della data di osservazione; inoltre nel firmware 10Micron vengono calcolati anche i fenomeni di nutazione e l’aberrazione della luce. Un altro fattore che può limitare l’accuratezza della montatura per lunghi periodi è la variazione di velocità di rotazione della Terra (che per l’appunto non è costante). Ciò che chiamiamo il “tempo UTC” è soltanto un’approssimazione dell’angolo di rotazione della Terra; l’angolo effettivo è misurato dall’UT1, se trascuriamo le variazioni stagionali e irregolari (che comunque ammontano a meno di un secondo d’arco). L’UTC si basa su orologi atomici, e talvolta viene inserito il cosiddetto “secondo intercalare” per mantenerlo entro 0,9 secondi dall’UT1. Quando si approssima l’UT1 con l’UTC, si può introdurre una differenza fino a 14 secondi d’arco nella vostra precisione di puntamento. Questa differenza cambia molto lentamente; il degrado del modello di puntamento, dovuto ad esempio al cedimento del terreno o all’affondamento della gamba nello stesso e altri fattori “lenti”, è sempre più veloce della variazione tra UTC e UT1 pertanto non si noterà alcun problema nella pratica. Ma quando si inserisce il “secondo intercalare” di compensazione, si ottiene un salto improvviso nelle coordinate. Ebbene abbiamo implementato, dalla versione firmware 2.13.6, una funzione che tiene conto anche dell’inserimento del secondo intercalare per ottenere la massima precisione possibile!
6 – Modellazione del moto di oggetti astronomici stessi
Un buon numero di oggetti astronomici presenta un movimento apparente: pianeti, asteroidi, comete e satelliti naturali o artificiali. Il firmware delle montature 10Micron è in grado di calcolare il movimento di tutti questi oggetti direttamente dai loro parametri orbitali (già inseriti per i pianeti, mentre per altri oggetti si dovranno caricare). I satelliti artificiali sono inseguiti tramite speciali funzioni; gli oggetti del sistema solare sono inseguiti automaticamente su entrambi gli assi, attivando l’impostazione “Follow object”. Va notato che la Luna ha un movimento apprezzabile in declinazione che molte montature semplicemente non considerano, anche se è selezionata la “velocità di inseguimento lunare”.
Autoguidare è più semplice … per chi costruisce le montature. Per l’utente, l’autoguida comporta ulteriori problemi. Nel caso in cui si utilizzi un telescopio guida, non sarà possibile compensare tutte le flessioni tra i due strumenti, e si aumenta il carico sulla montatura. Nel caso in cui si utilizzi una camera con guida interna oppure una guida fuori asse, ciò comporta comunque un cablaggio aggiuntivo, l’installazione del software e la configurazione e calibrazione del tutto. In ogni caso, questo significa avere ulteriori problemi per ricercare adeguate stelle di guida (operazione spesso molto difficoltosa e a volte impossibile), da farsi ogni qualvolta si punta un oggetto, per trovare i parametri del software di guida corretti e per effettuare una buona calibrazione.
Le montature HPS possono essere allineate a stelle luminose già durante il crepuscolo, quindi ogni secondo di buio può poi essere utilizzato per l’imaging e non speso per settare l’autoguida.
Inoltre, l’uso dell’autoguida non è sempre possibile; la situazioni tipica è l’imaging di un debole cometa in rapido movimento.
In ogni caso, se si vuole comunque autoguidare, le montature HPS dispongono di una tradizionale porta ST4 e possono essere autoguidate dai comuni software.
Le montature HPS dispongono di un ricco database di oggetti, che comprende non solo i classici cataloghi Messier e NGC / IC, ma anche molti cataloghi di stelle, comprese variabili e doppie, e di oggetti del cielo profondo. Inoltre, è presente un catalogo della superficie lunare, in quanto la precisione del sistema HPS consente di puntare addirittura i dettagli della Luna.
L’elevata velocità di puntamento è utile per accelerare le procedure di allineamento, ed è indispensabile per il puntamento dei satelliti (soprattutto dopo il passaggio al Meridiano). Inoltre, aiuta a velocizzare i tempi nelle applicazioni scientifiche di ricerca (es, ricerca di sueprnovae, astrometria ecc), aumentando la quantità di dati che possono essere ottenuti durante le sessioni osservative spesso brevi.
Le montature HPS dispongono di un ricco sistema di accessori per il montaggio di vari strumenti. E’ possibile anche utilizzare più strumenti contemporaneamente sulla stessa montatura; poiché il modello di puntamento e l’inseguimento dipende dal’orientamento dello strumento specifico (le flessioni o i sistemi di montaggio non consentono di avere strumenti esattamente paralleli fra loro), la montatura permette di creare modelli diversi, uno per ogni strumento, che possono essere salvati nella memoria interna e richiamati quando richiesto.
Un’altra caratteristica molto utile, soprattutto per le montature più grandi, è la funzione di bilanciamento elettronico. Con questa funzione è possibile misurare lo sbilanciamento della strumentazione nei due assi e regolare di conseguenza i contrappesi o la posizione del payload. L’alta velocità di spostamento aiuta a velocizzare anche questa procedura.
Le montature HPS dispongono di numerose opzioni di connessione; pur potendo scegliere la tradizionale connessione RS-232 per controllare l’elettronica da un PC esterno, oggi si preferisce usare questa porta ad esempio per controllare direttamente una cupola computerizzata. Il firmware fornirà tutti i calcoli rilevanti anche per montature in posizione decentrata e strumenti montati con un certo offset. La porta GPS diviene una porta aggiuntiva RS-232, se non si utilizza il GPS. Tuttavia il miglior modo di collegare la montatura al PC è la connessione LAN, tramite il protocollo TCP / IP, o la connessione senza fili; la montatura può connettersi a una rete WLAN esistente, oppure può essere utilizzata come un hotspot a cui il vostro PC, tablet o smartphone può connettersi. La connessione LAN offre maggior tolleranza all’alta tensione rispetto alle porte RS-232; ancora meglio si comporta la WLAN che è … wireless. In caso di osservatori remoti, che sono soggetti a fulmini, questo può fare la differenza tra una elettronica sana ed una completamente bruciata! La montatura supporta fino a dieci connessioni TCP / IP simultanee, in modo da utilizzare diversi software e dispositivi nello stesso tempo. 10Micron fornisce un driver ASCOM per Windows, ma se si desidera implementare il proprio sistema di controllo, mettiamo a disposizione il set di comandi che può essere utilizzato via RS-232, LAN e connessioni WLAN. Il set di comandi è in gran parte compatibile con il protocollo LX200, ma include molte altre funzioni e modalità operative. Nel funzionamento a distanza, si potranno apprezzare anche la sicurezza aggiuntiva fornita dagli encoder assoluti: in nessun caso si perde l’allineamento, anche in caso di scivolamento delle frizioni. Le montature HPS sono in grado di operare fino a 30° oltre il meridiano, in entrambe le direzioni (quindi con il telescopio in posizione più bassa rispetto ai contrappesi). Questo consente di avere un arco di 60 ° per l’inseguimento degli oggetti, corrispondente ad almeno quattro ore di inseguimento per oggetti che attraversano il meridiano (a condizione che non vi sia un altro limite impostato e che ci si accerti dell’assenza di interferenze meccaniche). Il valore di questo arco oltre il meridiano è impostabile da 0° a 30° per la massima flessibilità. La montatura avviserà quando si sta avvicinando al limite per l’inseguimento, raggiunto il quale l’inseguimento si arresta. Si dovrà quindi puntare di nuovo l’oggetto per forzare l’inversione al meridiano.
