
Découvrez comment notre Passion crée nos technologies, de la HPS (High Speed Precision) au derniere née DDS (Direct Drive System), de notre mécanique de précision au nos systèmes électroniques exclusifs et notre logiciel de contrôle …. MADE IN ITALY
L’un de nos projets les plus récents est une nouvelle génération de montures robotiques professionnels, dans la configuration azimutal à fourche, avec dérotateur / focuser à contrôle intégré, où nous avons appliqué notre système d’entraînement direct « Direct Drive System »
Montatures 10 Micron AZ ROBOTIC MOUNTS, AZ8000 et AZ5000, avec technologie DDS
Grace à notre longue expérience dans le domaine des montures astronomiques de haut niveau, nous sommes heureux d’offrir cette solution spécialement développée pour les applications professionnelles en astronomie et satellite, pour lesquels on a des exigences difficiles en termes de qualité, de performance et de fiabilité. Nos montures AZ DDS intègrent les dernières technologies mécaniques, électriques, électroniques, informatiques et de dessin; chaque composant spécifique a été très largement étudié afin d’atteindre le plus haut niveau d’efficacité qui a toujours caractérisé les produits 10Micron. On a également mis en œuvre des dispositifs de sécurité spéciaux tant pour l’operateur que pour l’instrumentation.

AZ5000 DDS-N avec un télescope de 24″, mise au point Nasmyth
Il arrive souvent qu’un client potentiel nous demande: Pourquoi devrais-je acheter une monture 10Micron?
La réponse courte est: parce que cela fonctionne mieux, intègre un certain nombre de fonctionnalités que d’autres montures ne disposent pas maintenant et dans un avenir prévisible, dispose d’un système de encodeurs absolus spéciaux sur les deux axes pour un fonctionnement de grande précision; ces caractéristiques sont si importantes, indépendamment de la façon dont les autres pourraient dire, qui peuvent changer totalement la façon dont vous pensez des observations astronomiques.
Si vous n’êtes pas satisfait de la réponse concise, lisez la suite.
![]()
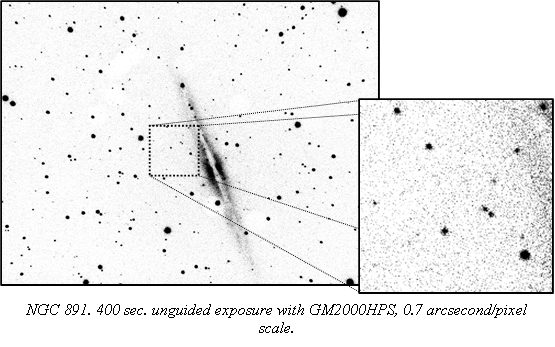
HPS signifie «haute précision et vitesse» et est le nom de cette série de montures astronomiques 10Micron. Elles disposent en fait ont deux encodeurs absolus de haute précision montés directement sur chaque axe pour assurer une précision sans précédent non seulement dans le pointage, mais surtout à la suivi, et de moteurs à grande vitesse. Cette amélioration impressionnante des performances par rapport à la technologie précédente permet un changement radical dans les procédures des observateurs et des astroimagers. Dans la plupart des applications, y compris la photographie à longue exposition du ciel profond, la nécessité d’un autoguidage est en fait éliminé. La précision de pointage assure que, une fois la monture est correctement initialisé, les objets seront parfaitement centrés dans le plus petit champs de vision, aussi pour une configuration mobile dans une prairie de montagne. En outre, l’électronique interne permet d’effectuer presque toutes les opérations sans avoir besoin d’un ordinateur externe.
Les encodeurs absolus intégrés dans les axes offrent une haute précision avec une rétroaction bien dessous de la seconde d’arc pour chaque mouvement de la monture. Les codeurs absolus rendent l’axe vif et capable de réagir également à toutes les forces extérieures telles que le vent et les vibrations ou les contacts accidentels. En outre, cette rétroaction est fournie indépendamment de toute procédure de réduction à zéro ou homing. Cela signifie que l’électronique connaisse toujours la position des axes de la monture. Il est donc possible de déplacer les axes avec les frictions débloqués et l’électronique éteinte, verrouiller les frictions dans une position quelconque et allumer encore: l’électronique saura toujours où le télescope pointe. Vous pouvez même utiliser la monture comme un télescope Dobsonian avec pointage manuel, en gardant complètement la précision « au dessous de la seconde d’arc » des encodeurs. Cela signifie avoir une plus grande facilité d’utilisation, puisque la procédure d’installation est beaucoup plus rapide.
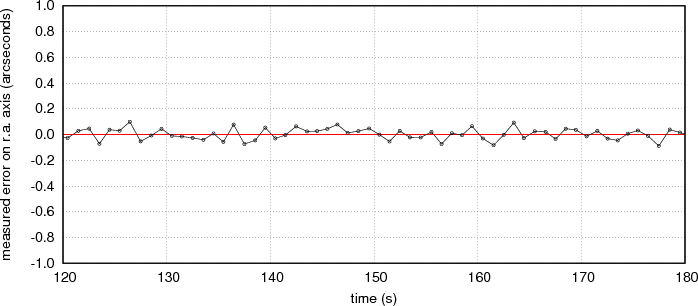
En référence à l’axe d’ascension droite, pratiquement toutes les «erreurs classiques» causées par les entraînements mécaniques sont supprimés, et pas seulement l’erreur périodique, qui comprend des irrégularités périodiques en raison de l’imperfection dans la production et l’assemblage de la vis sans fin, mais des erreurs aussi non périodiques causées par les imperfections de la couronne, les roulements, courroies, etc.
Pour ce qui concerne l’axe de déclinaison, il pourrait sembler que l’encodeur est moins important, parce que, théoriquement, il n’y a aucun mouvement sidéral. La réalité est cependant que l’axe de déclinaison est essentiel pour le suivi sidéral. Si vous voulez compenser la réfraction, les flexions causées par le montage du téelescope, et ainsi de suite, vous devrez déplacer l’axe de déclinaison à très basse vitesse. En outre, alors que l’axe d’ascension droite fonctionne toujours à la même vitesse (avec seulement quelques petites corrections en plus ou en moins), l’axe de déclinaison fonctionne toujours proche de vitesse zéro, avec inversions occasionnelles de direction du mouvement. Cela signifie que les jeux mécaniques, les flexions des courroies et des friction sont toujours présents et vous ne pouvez pas compter sur un système de correction d’erreur périodique (PEC) pour les compenser.
Astuces pour réduire au minimum l’effet de ces forces dans les montures traditionnels nécessitent une très légère précontrainte sur la vis sans fin, avec le risque de mouvements incontrôlés lorsque le télescope est soumis à de petites forces externes, en raison du dégagement de la vis elle-même de la couronne; ou des procédures d’étalonnage infructueuses dans le logiciel pour compenser les jeux (backlash); encore, des réglages manuelles. Ou même, d’introduire des erreurs d’alignement pour forcer les corrections de l’autoguidage dans la même direction. Ainsi, ayant un encodeur monté directement sur l’axe pour compenser toute l’erreur mécanique est tout aussi important dans la déclinaison comme en ascension droite.
La fonction de suivi des objets astronomiques peut être décomposé en plusieurs sous-fonctions qui seront discutées dans les paragraphes à venir.
Afin d’atteindre la précision au dessus d’une seconde d’arc, tous ces paramètres doivent être pris en compte. En outre, plusieurs «effets subtils» commencent à se manifester, et ont besoin d’une attention particulière.
1- Modélisation de l’orientation de la monture par rapport à la Terre.
Les montures HPS peuvent faire la même chose, avec l’utilisation supplémentaire de cette information pour corriger le suivi des objets. Cela signifie que le suivi sera toujours correcte, même si l’instrument n’est pas aligné sur le pôle céleste. Bien sûr, vous avez besoin d’un alignement raisonnable pour éviter la rotation de champ dan les images a longue exposition. La logiciel 10micron fournit plusieurs fonctions importantes; par exemple, pour la station polaire, le logiciel vous dira combien de tours ou de fractions de tour vous devrez tourner les boutons de réglage de l’azimut et la hauteur des boutons de réglage pour s’aligner au pôle! De cette façon, nous avons éliminé le viseur polaire, au bénéfice de la rigidité mécanique des axes et de la facilité d’utilisation; en fait, l’alignement initial peut être réalisé avec la monture désaligné de plusieurs degrés par rapport au pôle céleste, de centrage de deux étoiles brillantes dans l’oculaire (également avec les mouvements manuels des axes, comme dans un Dobson), puis une troisième étoile avec les boutons azimutales en suivant les directions fournies; Cela est certainement beaucoup plus pratique et plus rapide que l’alignement avec le viseur polaire typique qui a besoin de la date et l’heure de réglage, la compensation de longitude, et peut-être que vous nécessitez de rester à genoux pour centrer les étoiles approprié pour votre hémisphère dans un petit champ de vision .
Pour utiliser le système 10micron cependant, il est nécessaire une connaissance de l’heure exacte et de la position sur la Terre. Si vous envisagez de réutiliser l’alignement plus tard (par exemple, si vous êtes dans un observatoire), vous devez garder l’horloge interne de la monture synchronisé avec précision et utiliser des coordonnées précises pour le site. Pour cette raison, en plus des informations d’initialisation habituelles du panneau de commande ou par PC externe, les monture 10micron fournissent également un module GPS dédié pour l’acquisition précise et immédiate de ces informations
2 – Modélisation de l’orientation du télescope par rapport à la monture
L’axe optique de votre télescope ne sera pas parfaitement perpendiculaire à l’axe de déclinaison, et ne sera pas parfaitement aligné avec l’angle zéro de l’encodeur absolu. Lors de l’ajout de la troisième étoile pour la procédure d’alignement, ces erreurs sont calculées et corrigées instantanément et automatiquement.
3 –Modélisation des erreurs du système mécanique par rapport à un «système idéal».
Nous savons tous qu’aucun système mécanique peut être considéré comme «idéal». Même avec un encodeur de grande précision monté directement sur les axes, par exemple, il reste le problème de la déformation mécanique. Dans la grande majorité des montures disponibles sur le marché, les erreurs mécaniques ne sont pas prises en compte par le logiciel de contrôle. Bien sûr, ces erreurs peuvent être réduites au minimum (mais pas éliminé) par un design soignée et donc au stade de la production, mais, par exemple, si l’on considère une erreur d’une seconde d’arc lors de l’exposition d’une image, un simple calcul montre que cette erreur peut être introduite par une déformation du trépied de cinq millièmes de millimètre! Une déformation telle que cela peut être causé facilement en déplaçant simplement les axes d’un télescope dont le centre de gravité n’est pas parfaitement équilibrée. Donc, la meilleure idée que vous pouvez mettre en œuvre est de créer un modèle virtuel qui représente la déviation mécanique de la monture et du télescope. Nous devons viser diverses positions dans le ciel, et le système 10Micron compare la position avec lecture réelle de l’encodeur (ie, l’angle absolu sur les axes de la monture). Avec un nombre suffisant de points, les flexions peuvent être modélisées assez bien pour permettre un pointage de haute précision. À notre connaissance, aucun monture astronomique sur le marché intègre cette fonction sans l’utilisation d’un ordinateur externe. Avec les montures 10Micron, la procédure est extrêmement simple, car il suffit d’ajouter autres étoiles à ceux déjà utilisés pour l’alignement initial. Bien sûr, cela peut être automatisée de façon très efficace en utilisant des programmes externes qui pointent un ensemble prédéfini de positions dans le ciel, afin de prendre des photos et de mesurer les coordonnées exactes dans un processus appelé en anglais « plate solving » et encore fournir les coordonnées à la monture. Vous pouvez utiliser jusqu’à 100 étoiles / points d’ alignement à cet effet, et la procédure peut avoir lieu dans un temps étonnamment court, grâce à la vitesse très élevée des montures 10Micron. Tout cela fonctionne si les erreurs mécaniques sont répétables. Cela signifie que, tandis que la flexion mécanique peut généralement être modélisée avec une excellente précision, cela ne vaut pas pour le jeu mécanique. Cependant, dans les montures 10Micron les encodeurs absolus sur les axes éliminent totalement les problèmes de jeux mécaniques, au cours du processus de modélisation ou tout en pointant ou en suivant un objet; à l’utilisateur ne reste que la tâche d’éliminer les problèmes de miroir flop, jeux mécaniques sur la mise au point, etc.
4 -Modélisation de l’influence de l’atmosphère sur le trajet des faisceaux lumineux.
L’atmosphère terrestre dévie les faisceaux lumineux provenant de les objets célestes, en fonction de la densité de l’air. Ce phénomène est appelé «réfraction atmosphérique. » Avec certains montures traditionnels, il est souvent conseillé de viser l’axe d’ascension droite vers le pôle céleste réfractée, et mettre en place une vitesse de suivi spécial (la vitesse soi-disant «king»), qui compense à peu près la différence de vitesse apparente due à la réfraction (seulement en ascension droite). Les montures 10Micron possèdent un système beaucoup plus efficace, et permettent de définir les valeurs de la pression atmosphérique et la température de l’air afin d’obtenir une correction très précise de la réfraction; ces valeurs peuvent être modifiées au cours de la session d’observation, pour corriger le suivi et le pointage en fonction des changements climatiques. Ceci peut être effectué manuellement à partir de la raquette ou d’un ordinateur externe.
5 – Modélisation de l’orientation de la Terre.
Nous savons tous que la Terre tourne par rapport à des objets astronomiques et son mouvement principal est la rotation diurne. Une monture équatoriale compense la rotation diurne de la terre avec un mouvement à vitesse constante autour de l’axe d’ascension droite. Cette vitesse est habituellement donnée par une horloge à quartz, et il devrait donc être raisonnablement précis. Ce que beaucoup ne savent pas est que les oscillateurs utilisés dans le quartz électronique (et même dans votre PC) ne sont pas corrigées pour la température. De plus, ils ne sont pas extrêmement précis de toute façon. À une température de -5 ° C (23 ° F), ce qui n’est rare pour une session astrnomique, un quartz typique peut avoir une erreur de quelques dizaines de parties par million (ppm). Erreurs de 20 ou 30 ppm sont communément observées, et peuvent provoquer des erreurs d’ascension droite accumulant environ 2,5 secondes par jour, ce qui signifie plus d’une seconde d’arc par heure. La perte de précision de pointage dans une nuit d’hiver de 12 heures serait d’environ 20 arcsec, et beaucoup plus si la monture est éteint et rallumé plusieurs jours plus tard. Ce problème peut être corrigé tout en conservant la monture toujours synchronisé avec une source externe, comme un PC standard avec l’horloge synchronisée avec les serveurs de temps NIST, ou avec le module GPS optionnel dont nous avons déjà parlé. Actuellement, tous nos systèmes ont une horloge avec batterie de secours avec compensation de température, capable de marquer le temps avec une précision de 3,5 ppm de -40 ° C à + 40 ° C (-40 ° F à + 104 ° F). Un mouvement beaucoup plus lent, mais toujours d’une importance fondamentale, est la précession des équinoxes. Si vous ne modélisez pas la précession, vous serez obligé d’utiliser les coordonnées standard (par exemple lors de l’alignement). Certains pourraient penser que si vous faites un alignement avec les coordonnées de J2000, alors vous devriez être en mesure de pointer précisément les objets, en utilisant le même J2000 coordonnées: pas du tout! La précession change la direction de l’axe de rotation de la Terre, qui est le pôle céleste, alors cela signifie que l’alignement pourrait fonctionner … pendant quelques minutes, après quoi la précision de pointage serait très mauvais. Certains systèmes ne prennent pas en compte la précession, par opposition à 10Micron! Par défault, les montures 10Micron travaillent en JNOW tout en communiquant avec l’extérieur, par exemple, les coordonnées que vous lisez dans la raquette sont référées à l’équinoxe vrai de la date d’observation; Également la logiciel 10Micron calcule les phénomènes de nutation et l’aberration de la lumière. Un autre facteur qui peut limiter la précision de la monture pendant de longues périodes est la variation de la vitesse de rotation de la Terre (qui n’est pas constante). Ce que nous appelons le « temps UTC » est seulement une approximation de l’angle de rotation de la Terre; l’angle réel est mesuré par l’UT1, si l’on néglige les variations saisonnières et irrégulières (qui représentent bien moins d’une seconde d’arc). L’UTC est basé sur des horloges atomiques, et il est parfois ajouté à la soi-disant « seconde intercalaire » pour le garder dans 0,9 secondes par l’UT1. Quand la UT1 vient approché àl’UTC, vous pouvez introduire une différence jusqu’à 14 secondes d’arc dans votre précision de pointage. Cette différence change très lentement; la dégradation du modèle de pointage, causée par exemple à l’affaissement du sol ou à l’effondrement de la jambe dans les sol ou d’autres facteurs «lentilles», est toujours plus rapide que la variation entre l’UTC et l’UT1 et ne sera donc pas un problème dans la pratique. Mais quand vous mettez la « seconde intercalaire », vous obtenez un saut soudain dans les coordonnées. Eh bien, nous avons mis en place, de la version de firmware 2.13.6, une fonction qui prend également en compte l’inclusion de la seconde intercalaire pour obtenir la plus grande précision possible !
6 -Modélisation du mouvement des objets astronomiques eux-mêmes
Un bon nombre d’objets astronomiques possède un mouvement apparent: les planètes, les astéroïdes, les comètes et les satellites naturels ou artificiels. La logiciel 10Micron est capable de calculer le mouvement de tous ces objets directement à partir de leurs paramètres orbitaux (déjà insérés dans les planètes, tandis que pour d’autres objets que vous aurez à télécharger). Les satellites sont suivis par des fonctions spéciales; Les objets du système solaire sont automatiquement suivis sur les deux axes en activant la fonction «Follow object ». Il convient de noter que la Lune a une variation sensible du mouvement que de nombreux montures simplement ne considèrent tout pas, même si la vitesse de suivi lunaire est sélectionné.
L’Autoguidage est plus facile … pour ceux qui construisent les montures!. Pour l’utilisateur, le guidage implique d’autres problèmes. Dans le cas où vous utilisez un télescope de guidage, il ne sera pas possible de compenser toutes les flexions entre les deux instruments, et vous augmenteras la charge sur la monture. Si vous utilisez une camera avec guide intérieur ou un diviseur optique, cependant, vous aurez du câblage supplémentaire, l’installation du logiciel, la configuration et l’étalonnage de l’ensemble. Dans tous les cas, cela signifie d’avoir des problèmes supplémentaires à la recherche d’étoiles adéquates de guidage (opération souvent très difficile et parfois impossible), chaque fois que vous pointez un objet, de trouver les paramètres du logiciel de conduite corrigée et d’effectuer un bon étalonnage.
Les montures HPS peuvent être alignées sur les étoiles brillantes déjà pendant le crépuscule, donc chaque seconde de l’obscurité peut ensuite être utilisés pour l’imagerie et pas dépensés pour régler le Guidage
En outre, l’utilisation de l’autoguidage n’est pas toujours possible; la situations typique est l’imagerie d’une faible comète qui se déplaçant rapidement.
Dans tous les cas, si vous voulez utiliser l’autoguidage, les montures HPS disposent d’un port ST4 traditionnel et peuvent être pilotées par les communes logiciel.
Les montures HPS possèdent une riche base de données embarquées, qui comprend non seulement les catalogues classiques Messier et NGC / IC, mais aussi de nombreux catalogues d’étoiles, y compris les variables et les doubles, et les objets du ciel profond. En outre, il existe un catalogue de la surface lunaire, car la précision du système de HPS peut pointer les détails de la Lune.
La vitesse élevée de pointage est utile pour accélérer les procédures d’alignement, et il est indispensable pour le pointage des satellites (surtout après le passage du méridien). Elle contribue également à accélérer le travail dans les applications de recherche scientifique (par exemple, la recherche de supernovae, astrométrie, etc.), avec l’augmentation de la quantité de données qui peuvent être obtenues au cours des d’observation souvent courtes.
Les montures HPS disposent d’une variété d’accessoires de système pour l’installation de divers instruments. Il est également possible d’utiliser plusieurs instruments simultanément sur la même monture; puisque le modèle de pointage et le suivi dépend de l’orientement de l’instrument spécifique (les flexions ou les systèmes de montage ne permet pas de disposer d’instruments exactement parallèles entre eux), la monture permet de créer des modèles différents, un pour chaque instrument, qui peut être enregistrés dans la mémoire interne et rappelés en cas de besoin.
Une autre caractéristique très utile, en particulier pour les montures plus larges, est la fonction de balance électronique. Avec cette fonction, vous pouvez mesurer le déséquilibre de l’instrumentation dans les deux axes et d’ajuster les contrepoids ou la position de la charge utile. La grande vitesse de mouvement contribue à accélérer cette procédure
Les montures HPS possèdent de nombreuses options de connexion; bien qu’il est possible choisir la traditionnelle connexion RS-232 pour contrôler l’électronique par un PC externe, probablement vous préférez utiliser ce port par exemple pour contrôler directement un dôme informatisé. La logiciel fournit également tous les calculs pertinents aussi pour les montures hors-centre et pour les instruments montés avec un certain décalage. Le port de GPS devient une porte supplémentaires RS-232, si vous n’’utilisez pas le GPS. Cependant, la meilleure façon de connecter la monture à l’ordinateur est la connexion LAN via TCP / IP ou une connexion sans fil; la monture peut se connecter à un réseau WLAN existant, ou peut être utilisé comme un point d’accès auquel votre ordinateur, tablette ou smartphone peut se connecter. La connexion LAN offre une plus grande tolérance à haute tension que le port RS-232; encore mieux c’est la WLAN sans fil…. Dans le cas des observatoires à distance, qui sont soumis à la foudre, cela peut faire la différence entre une électronique en bonne santé et une totalement brûlé! La monture prend en charge jusqu’à dix connexions simultanées TCP / IP, de manière à utiliser des logiciels et dispositifs différents dans le même temps. 10Micron fournit un pilote ASCOM pour Windows, mais si vous voulez utiliser votre système de contrôle, nous fournissons un ensemble de commandes qui peuvent être utilisées par RS-232, LAN et connexions WLAN. Le set de commande est largement compatible avec le protocole LX200, mais comprend de nombreuses autres fonctions et modes de fonctionnement. Dans le fonctionnement à distance, la sécurité supplémentaire fournie par les encodeurs absolus sera également très appréciée: jamais le système perdra l’alignement, même en cas de glissement de les frictions. Les montures HPS sont capables de fonctionner jusqu’à 30° passé le méridien, dans les deux sens (donc avec le télescope dans la position la plus basse par rapport aux contrepoids). Cela permet d’avoir un arc de 60 ° pour le suivi des objets, correspondant à environ quatre heures de suivi pour les objets qui traversent le méridien (à condition qu’il n’y ait pas une autre limite fixée et qu’il est établi l’absence d’interférence mécanique). La valeur de cet arc sur le méridien est réglé de 0 ° à 30 ° pour une flexibilité maximale. La monture vous avertit lorsque vous approchez de la limite pour le suivi, atteinte laquelle le suivi arrête. Ensuite, vous devrez pointer encore l’objet pour forcer le retournement au méridien.
